1 / 3
1 / 3Kamerabasiertes Handling von Deckeln mit igus ReBeL Cobot




Hardwarepreis:
DOF
6
Maximale Nutzlast
2
kg
Maximale Reichweite
660
mm
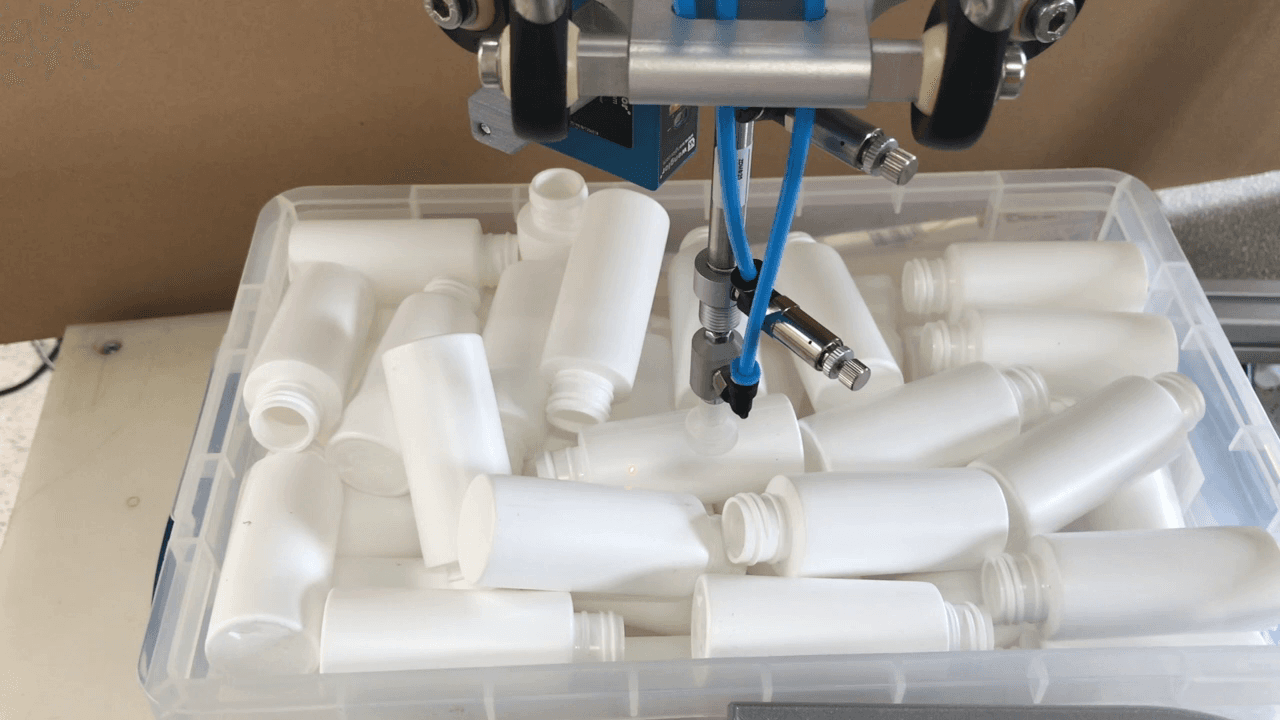
Automatisierte Deckelhandhabung mit igus ReBeL und ifm Sensor: Präzision und Effizienz
Effiziente Pick-and-Place-Operationen erfordern Genauigkeit, Geschwindigkeit und eine nahtlose Kommunikation zwischen den Komponenten. Dieses fortschrittliche System nutzt den igus ReBeL 6DOF-Roboterarm, ausgestattet mit einem Sauggreifer, sowie einen ifm Sensor und eine Kamera zur Objekterkennung. Die Technologien arbeiten zusammen, um Deckelpositionen zu identifizieren und präzise Bewegungen zu steuern, wodurch eine zuverlässige und optimierte Leistung für automatisierte Handhabungsaufgaben erreicht wird.
Was ist die Anwendung?
Das System automatisiert Pick-and-Place-Aufgaben für Deckel, indem es fortschrittliche Sensoren und Kameras nutzt, um Objekte zu erkennen und sicher zu positionieren.
Welche Vorteile bietet die Lösung?
Erhöhte Genauigkeit: Sensorbasierte Objekterkennung gewährleistet präzise Deckelpositionierung.
Hohe Geschwindigkeit: Bietet mühelos schnelle Pick-and-Place-Operationen.
Intuitive Steuerung: Die benutzerfreundliche Software vereinfacht die Roboterprogrammierung und Bedienung.
Welche Vorteile bietet der Roboter?
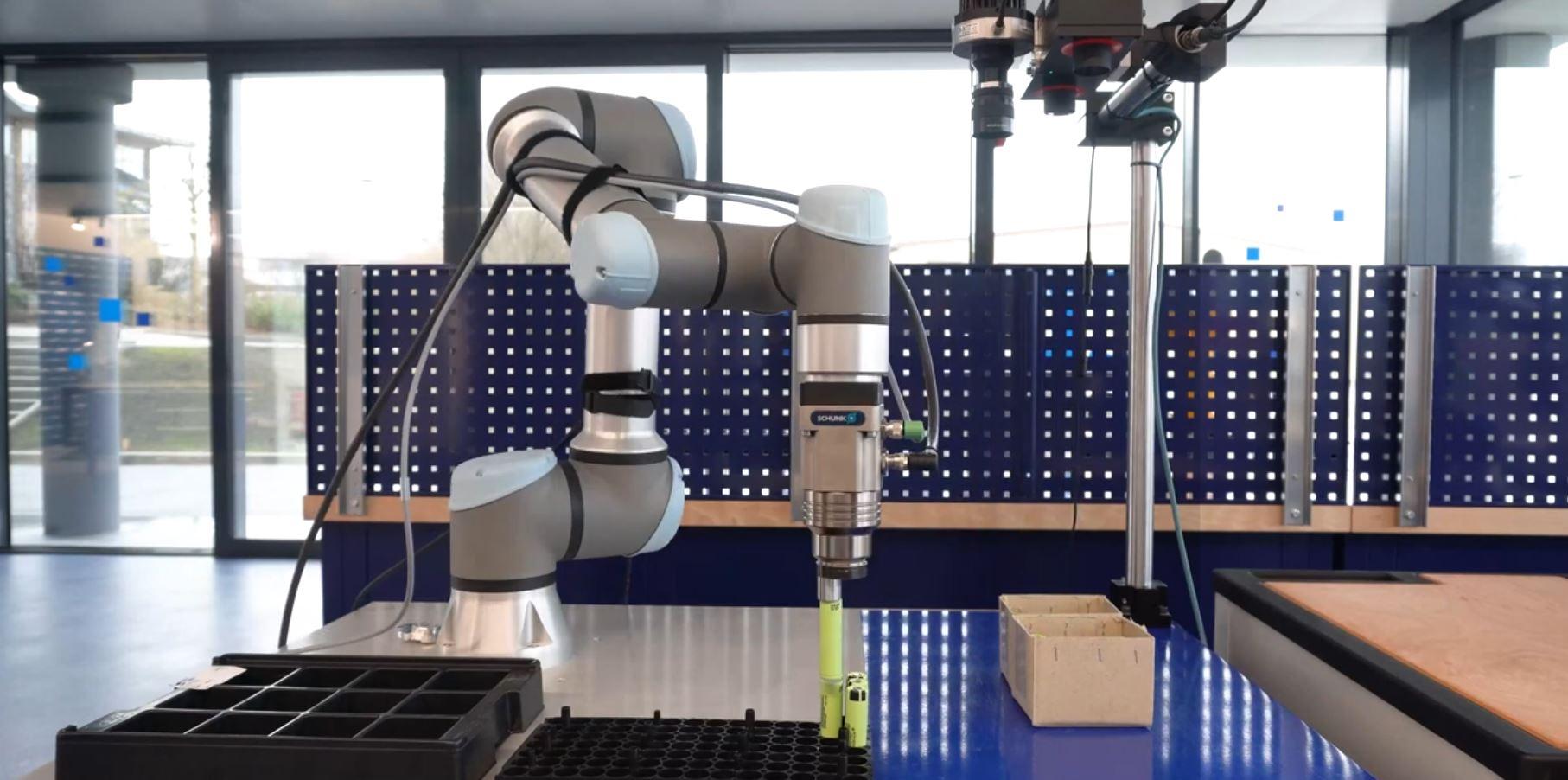
Der igus ReBeL 6DOF-Roboterarm bietet fortschrittliche Funktionen für präzise Handhabung:
Flexibilität: Sechs Freiheitsgrade ermöglichen vielseitige Bewegungen.
Zuverlässiges Greifen: Der Sauggreifer sorgt für sicheren und konsistenten Objekttransfer.
Nahtlose Integration: Kommuniziert effektiv mit Sensoren und Software-Schnittstellen.
Optimierung von Pick-and-Place-Prozessen durch fortschrittliche Automatisierung
Dieses System kombiniert den igus ReBeL Roboterarm, ifm Sensor und eine Kamera, um schnelle, präzise und zuverlässige automatisierte Deckelhandhabung zu liefern. Mit der Fähigkeit, wiederholbare Aufgaben effizient auszuführen, bietet es eine ideale Lösung für Branchen, die Präzision und hohe Geschwindigkeit in Pick-and-Place-Prozessen verlangen.
5 Komponenten