1 / 3
1 / 3Kamerabasierte Pick and Place Anwendung mit Drehgreifer




Hardwarepreis:
Beschleunigung
20
m/s²
Wiederholgenauigkeit
0,5
mm
DOF
3
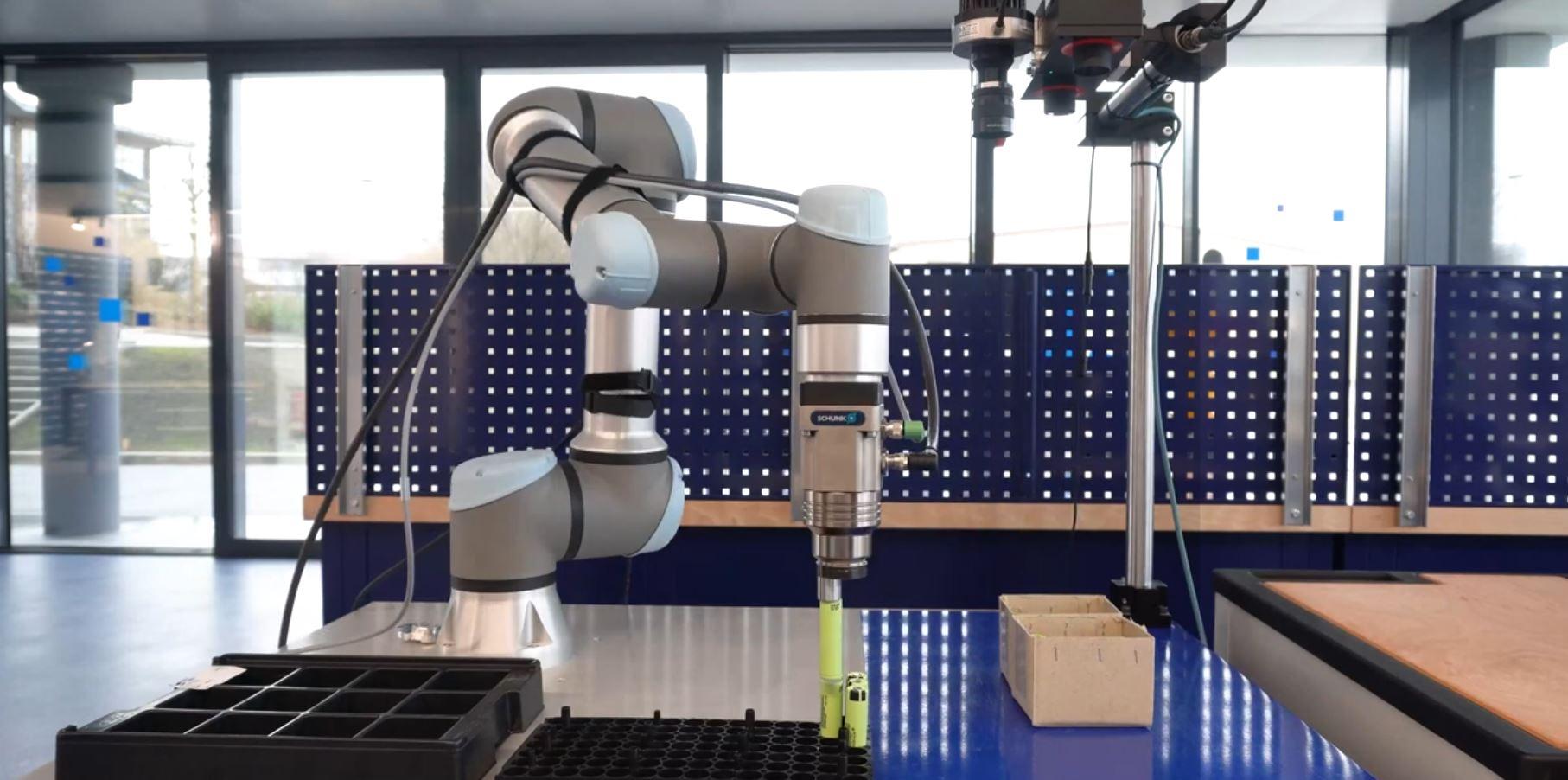
Delta-Roboterzelle: Präzision und Effizienz in der Handhabung kleiner Komponenten
Die Handhabung kleiner Komponenten in der Fertigung erfordert höchste Genauigkeit und Effizienz, um reibungslose Arbeitsabläufe sicherzustellen. In diesem Kundentest wird eine Delta-Roboterzelle demonstriert, die einen pneumatischen Drehgreifer und ein Kamerasystem für präzise Abläufe nutzt. Auf einem Förderband platzierte Komponenten werden von der Kamera erfasst, die die genauen Positionen aufnimmt und Koordinatendaten an den Roboter übermittelt. Anhand dieser Eingaben greift der Delta-Roboter die Komponenten zuverlässig und platziert sie in gleichbleibender Ausrichtung. So werden die Vorteile moderner Automatisierungstechnologien eindrucksvoll demonstriert.
Was ist die Anwendung?
Das System automatisiert die Handhabung kleiner Komponenten auf Förderbändern und ermöglicht eine präzise Positionierung und Platzierung in Fertigungs- und Montageprozessen.
Was sind die Vorteile der Lösung?
Erhöhte Präzision: Kameragesteuerte Bewegungen gewährleisten exaktes Greifen und Platzieren.
Unterbrechungsfreier Workflow: Automatisierter Betrieb sorgt für durchgängige Produktivität.
Vielseitige Integration: Kompaktes Design passt sich nahtlos an unterschiedliche Produktionsumgebungen an.
Was sind die Vorteile des Roboters?
Der Delta-Roboter überzeugt durch zuverlässige Leistung:
Exakte Bewegungen: Der pneumatische Drehgreifer sorgt für eine präzise Handhabung.
Flexibilität: Passt sich mühelos an verschiedene Komponentengrößen und Anordnungen an.
Geschwindigkeit und Effizienz: Verarbeitet Teile schnell, ohne die Genauigkeit zu beeinträchtigen.
Montageprozesse modernisieren mit Delta-Robotertechnologie
Diese Delta-Roboterzelle zeigt, wie Automatisierung die Produktivität bei der Handhabung kleiner Komponenten steigert. Durch die Kombination aus Kamerasystemen, präzisen Roboterbewegungen und innovativen Greifertechnologien setzt sie neue Maßstäbe in puncto Genauigkeit und Effizienz und ist ein unverzichtbares Werkzeug für fortschrittliche Fertigungslösungen.
4 Komponenten