1 / 5
1 / 5Fahrerloses Transportsystem mit Mehrachsgelenkroboter




Hardwarepreis:
DOF
5
Maximale Nutzlast
0,5
kg
Wiederholgenauigkeit
1
mm
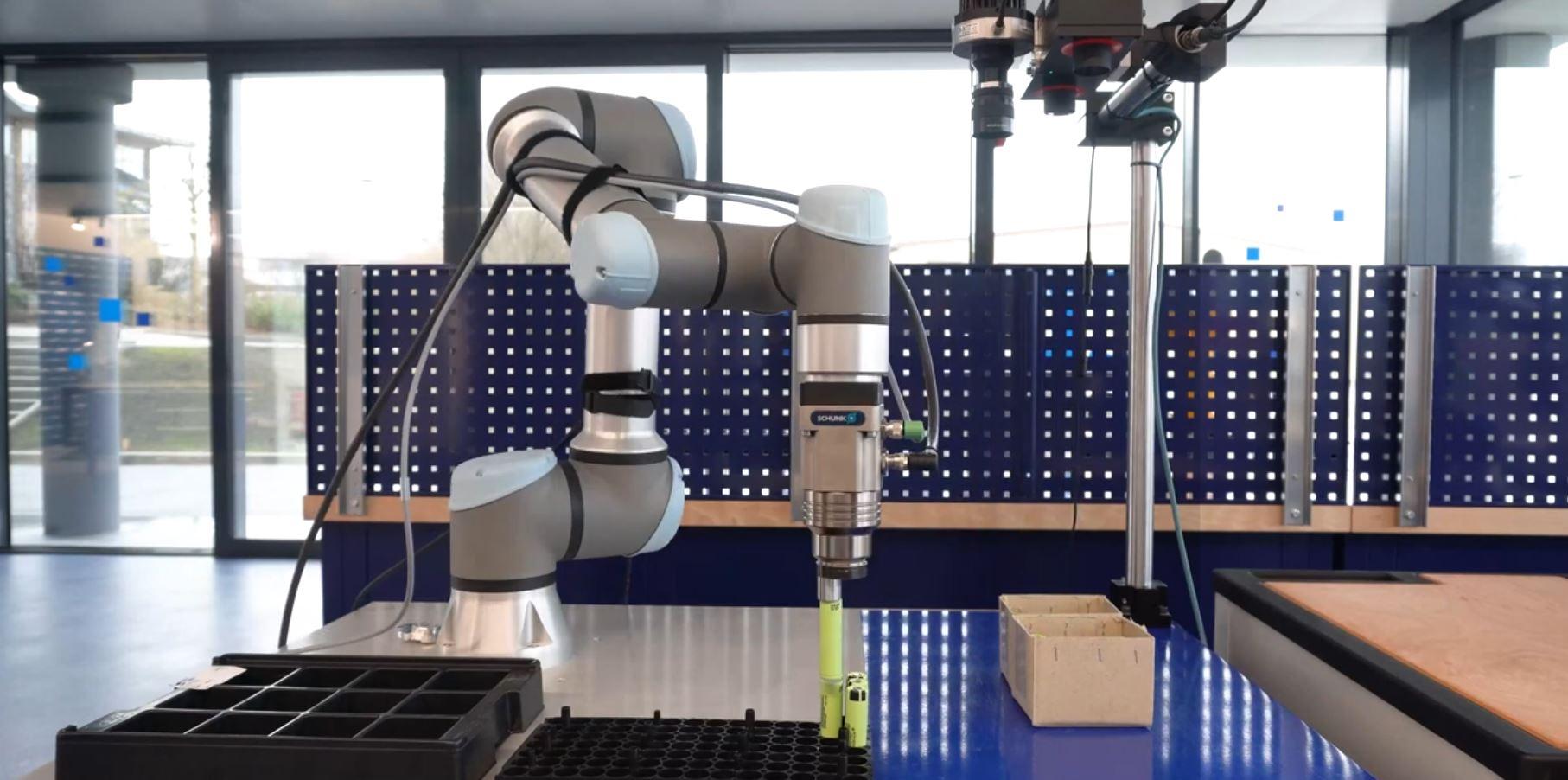
AMR-Mid Plattform: Flexible Automatisierung für Fetch-and-Carry-Services
Die AMR-Mid Plattform ist eine innovative Lösung für den automatisierten Transport und die Manipulation von Objekten und eignet sich ideal für Fetch-and-Carry-Dienste. Sie ist mit einem Differentialantrieb, Steuerungselektronik und fortschrittlichen Sensoren zur Umgebungsdetektion und Kollisionsvermeidung ausgestattet. Diese vielseitige Plattform ist in zwei Varianten erhältlich und bietet Flexibilität für praktische Anwendungen sowie für Lernumgebungen.
Was ist die Anwendung?
Das System automatisiert Objektmanipulation und -transport und eignet sich für Branchen wie Logistik, Fertigung und Servicerobotik sowie für den Einsatz in der Ausbildung, um die Navigation mobiler Roboter zu verstehen.
Was sind die Vorteile der Lösung?
Objektmanipulation: Die Variante mit 6-Achs-Roboterarm ermöglicht Tischhöhen-Handhabung mit optionaler 3D-Kamera zur Objekterkennung.
Vielseitiges Lernen: Die Variante ohne Arm dient als Ausbildungswerkzeug, um Navigation und Steuermechanismen zu erlernen.
Kollisionsvermeidung: Fortschrittliche Sensoren gewährleisten einen sicheren und zuverlässigen Betrieb.
Was sind die Vorteile des Roboters?
Die AMR-Mid Plattform bietet:
Modulares Design: Anpassbar für praktische Anwendungen oder für praktische Lernerfahrungen.
Effizienter Betrieb: Der Differentialantrieb sorgt für sanfte und präzise Mobilität.
Skalierbare Nutzung: Geeignet für industrielle Anwendungen ebenso wie für die Robotikausbildung.
Optimierung der Mobilität mit der AMR-Mid Plattform
Die AMR-Mid Plattform besticht als vielseitige Lösung, die Fetch-and-Carry-Abläufe optimiert und gleichzeitig die Erforschung der Robotiktechnologie in Bildungsbereichen fördert. Mit ihrem flexiblen Design und Kollisionsvermeidung ermöglicht sie effiziente Arbeitsabläufe und schafft Raum für Innovationen in industriellen und akademischen Anwendungen.
0 Komponenten